控制精度可以從四個指標(biāo)進行考察;當(dāng)使用較大幅度的正弦波時,頻率響應(yīng)也對極限斜率非常敏感。本文興迪源機械帶來伺服控制專輯之控制精度及幅頻特性。
一、伺服控制專輯—控制精度:
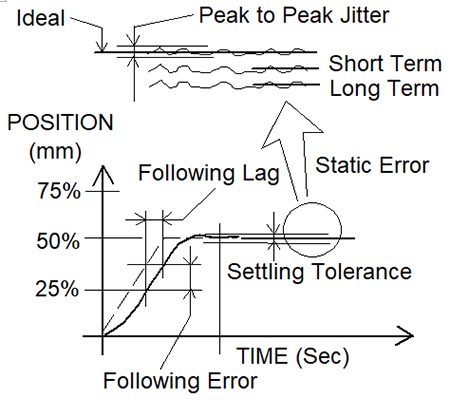
控制精度可以從四個指標(biāo)進行考察:
1)瞬時靜態(tài)誤差:這種控制誤差是由伺服閥的誤差決定的,往往是在瞬間產(chǎn)生,不過這種誤差很少出現(xiàn)。例如;伺服閥分辨率和滯環(huán),由于負載變化而引起的壓力增益偏差等。
2)長期靜態(tài)誤差:是由于溫度漂移,伺服閥組件磨損等原因而引起的。最壞的情況是伺服閥樣本中所有誤差累加在一起。
積分的使用:積分器通常用于消除長期的靜態(tài)誤差。在時間平均的基礎(chǔ)上,積分器將產(chǎn)生0控制誤差,但這并不意味著靜態(tài)誤差始終為0(靜態(tài)誤差的平均值為0)。即使可以迅速進行校正,仍會發(fā)生類似于瞬時的靜態(tài)誤差(瞬時誤差就是瞬間的偏差信號)。
3)峰峰值誤差(抖動):靜態(tài)和低頻工作時有時可能會出現(xiàn)高頻抖動。通常,這種情況是由于機械設(shè)計不合理,缸(或者閥芯)的摩擦力太大,游隙,電信號噪聲等導(dǎo)致的。這種類型的誤差很難計算(這種誤差是非線性誤差)。
4)跟隨誤差:是跟隨斜坡命令時產(chǎn)生的(跟蹤)誤差。誤差與斜坡速度成比例地增加,可以根據(jù)瞬間的跟隨誤差或跟隨滯后來計算;達到指令值所需的時間。
注意:
1.控制器無法觀察到任何測量形式的誤差。測量誤差應(yīng)該疊加到控制器的總誤差上。傳感器誤差通常屬于長期誤差;例如由于溫度漂移。
2.實際上,對于電反饋閥,閥總的瞬時誤差可能約為1%,甚至更低。長期誤差可能高達10%,但一般情況下約為5%(即使有穩(wěn)態(tài)誤差,也并不影響閥的工作。因為電路板的PID模塊會給出相應(yīng)的偏差信號予以糾正)
3.可以通過積分作用(在某些情況下)或速度前饋(后面會重點介紹)在某種程度上消除跟隨誤差。
斜坡信號,是一階有差系統(tǒng),通過增加積分環(huán)節(jié),可以消除跟隨誤差。但是系統(tǒng)的階數(shù)不能太高,否則容易引起不穩(wěn)定。
二、伺服控制專輯——幅頻特性:
1)頻率響應(yīng):
當(dāng)使用較大幅度的正弦波時,頻率響應(yīng)也對極限斜率非常敏感。
注:為什么正弦波對斜坡信號的斜率非常敏感?因為當(dāng)斜率很小時,跟隨較慢,此時正弦波就會變?yōu)橐粋€幅值更低的三角波。波形就會失真。
與階躍響應(yīng)一樣,較小的信號響應(yīng)也代表了真實的動態(tài)效果:
對于控制環(huán)路分析,最重要的小信號頻率響應(yīng)參數(shù)如下:
•-3db頻率
•-45°相頻率(這是頻率的轉(zhuǎn)折點)
•-90°相頻
•峰值頻率
•dB過沖(諧振)
對于大信號;
•-3dB極限頻率
•-90°相位極限頻率
•正弦振幅
2)注意:
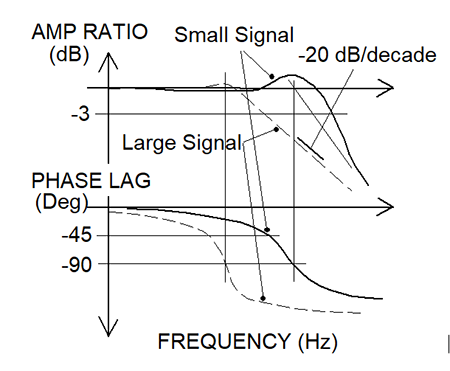
1. -3db點是輸出響應(yīng)下降到滿輸出的71%的位置;即性能開始下降的點。-3dB頻率通常也稱為系統(tǒng)帶寬。
2.在對數(shù)標(biāo)度上繪制dB(縱坐標(biāo))和頻率(橫坐標(biāo)),可以看出衰減的坐標(biāo)點。從圖中可以明顯看出大信號輸入下,幅值以-20dB /十倍頻程的斜率(這意味著10倍頻率響應(yīng)的1/10)衰減,也可以明顯觀察到相位響應(yīng)中的尖銳“拐點”。
3.一般情況下,伺服閥樣本中顯示100%的大信號響應(yīng)和25%或40%的響應(yīng),可以據(jù)此推測出小信號輸入下的性能。但是,有時候大信號輸入下的響應(yīng)會受到上升斜率的限制。此時就很難推測出真正情況下的系統(tǒng)動態(tài)。
4.小信號階躍響應(yīng)與頻率響應(yīng)之間存在關(guān)系;例如,階躍響應(yīng)中的超調(diào)百分比與頻率響應(yīng)中的dB過沖有關(guān)。這是分別在時域和頻域下的不同表示方法。
5.斜坡受限的頻率響應(yīng)波形往往更接近于三角形,而不是正弦波。在某些應(yīng)用中(例如材料測試),這可能是不可接受的;應(yīng)使用斜率比較大的伺服閥。
這個地方估計很多人很疑惑,為什么閥的響應(yīng)慢,輸出會由正弦波變?yōu)槿遣?因為在高頻下,系統(tǒng)的周期很短,在正弦信號下,輸出信號從小逐漸上升,還沒來得及上升到正弦波的頂部(四分之一周期),此時響應(yīng)是三角波的上升沿,就開始下降了(二分之一周期內(nèi)),變成了三角波的下降沿。
3)時域和頻域的計算:
由于伺服閥的響應(yīng)遠遠高于負載的響應(yīng),此時伺服閥可以等效為二階震蕩環(huán)節(jié)。根據(jù)自動控制原理,二階系統(tǒng)的諧振峰值Mr與超調(diào)量σp之間的關(guān)系如下:
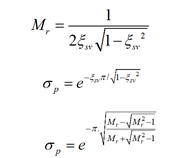
從上面式子可以看出,諧振峰值Mr與超調(diào)量σp只與阻尼系數(shù)ζsv有關(guān)。此處ζsv為伺服閥等效阻尼系數(shù)。只要測得幅頻特性曲線或者階躍響應(yīng)曲線中的一條,便可以確定阻尼系數(shù),從而計算出另外一個數(shù)值。需要注意的是,只有阻尼系數(shù)小于0.707時(此時諧振峰值為1db)上面關(guān)系式菜成立。當(dāng)阻尼系數(shù)大于0.707時,諧振峰值和超調(diào)量之間的關(guān)系便不復(fù)存在。在設(shè)計伺服閥時,為了避免諧振和超調(diào),阻尼系數(shù)理論數(shù)值一般取0.75。
4)上升時間與幅頻寬之間的關(guān)系:
上升時間tp與幅頻寬ωb之間的關(guān)系為:tp=0.35/ωb
【興迪源機械液壓技術(shù)優(yōu)勢】
興迪源機械嚴(yán)格按照ISO國際標(biāo)準(zhǔn)質(zhì)量管理體系和5S管理標(biāo)準(zhǔn)進行質(zhì)量監(jiān)控和內(nèi)部管理。建立有 “河南省流體壓力成形智能裝備工程技術(shù)研究中心”,核心團隊由數(shù)10名博士、碩士和各高等院校金屬成形專家教授組成,專注于液壓成形核心技術(shù)和產(chǎn)品工藝研發(fā)。

興迪源機械與中國科學(xué)院金屬研究所、南京航空航天大學(xué)等院校開展長期的產(chǎn)、學(xué)、研合作,并共同設(shè)立了“液壓成形技術(shù)產(chǎn)業(yè)化示范基地”,時刻跟蹤國內(nèi)外領(lǐng)先技術(shù),不斷提升“興迪源”液壓設(shè)備品牌價值。